June - August 2023
Overview
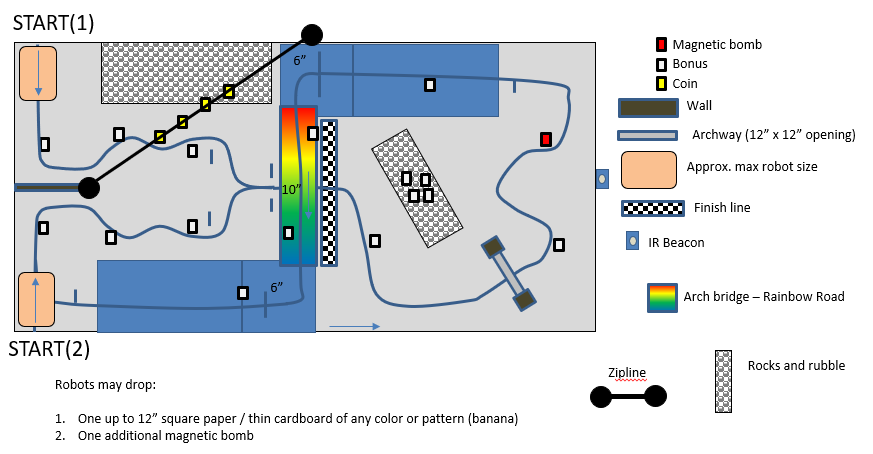
In the summer of 2023, students in my engineering program designed and manufactured autonomous robots to compete in a Mario Kart themed racing competition. The course included taped racing lines, mystery boxes and coins, an infrared beacon, and a zipline. My team took the most innovative but risky approach. We completely ignored the taped lines that every other team followed, as teams are allowed to drop a "Banana": a pattern paper to derail the competing robot. We instead followed the infrared beacon, and detected edges of the map to keep ourselves on track, and most impressively, took the zipline shortcut which only one other team atempted.
Design
- Designed, modeled, and manufactured multiple iterations of all mechanical parts of the robot
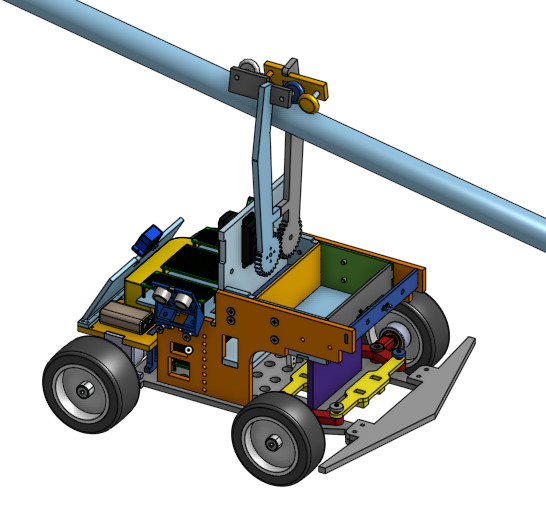
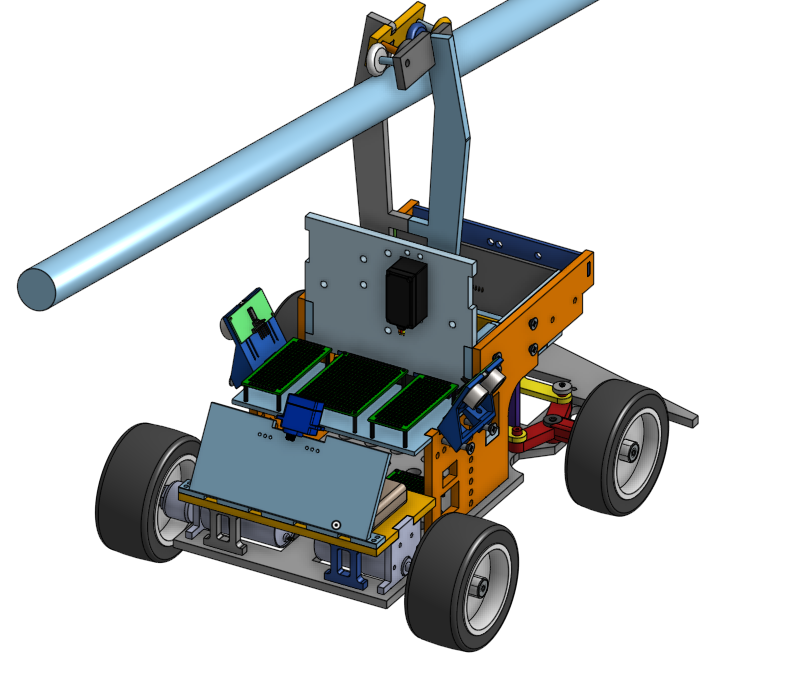
- Drive base relies on the Ackerman steering mechanism with a servo steering front wheels and DC motors driving backwheels
- Chassis made out of lasercut plywood and acrylic, and 3d printed parts
- Zipline mechanism is designed so that the roller wheels interlock into each other like a zipper, causing the upward reaction force from the beam to have a force component that helps the claw stay shut
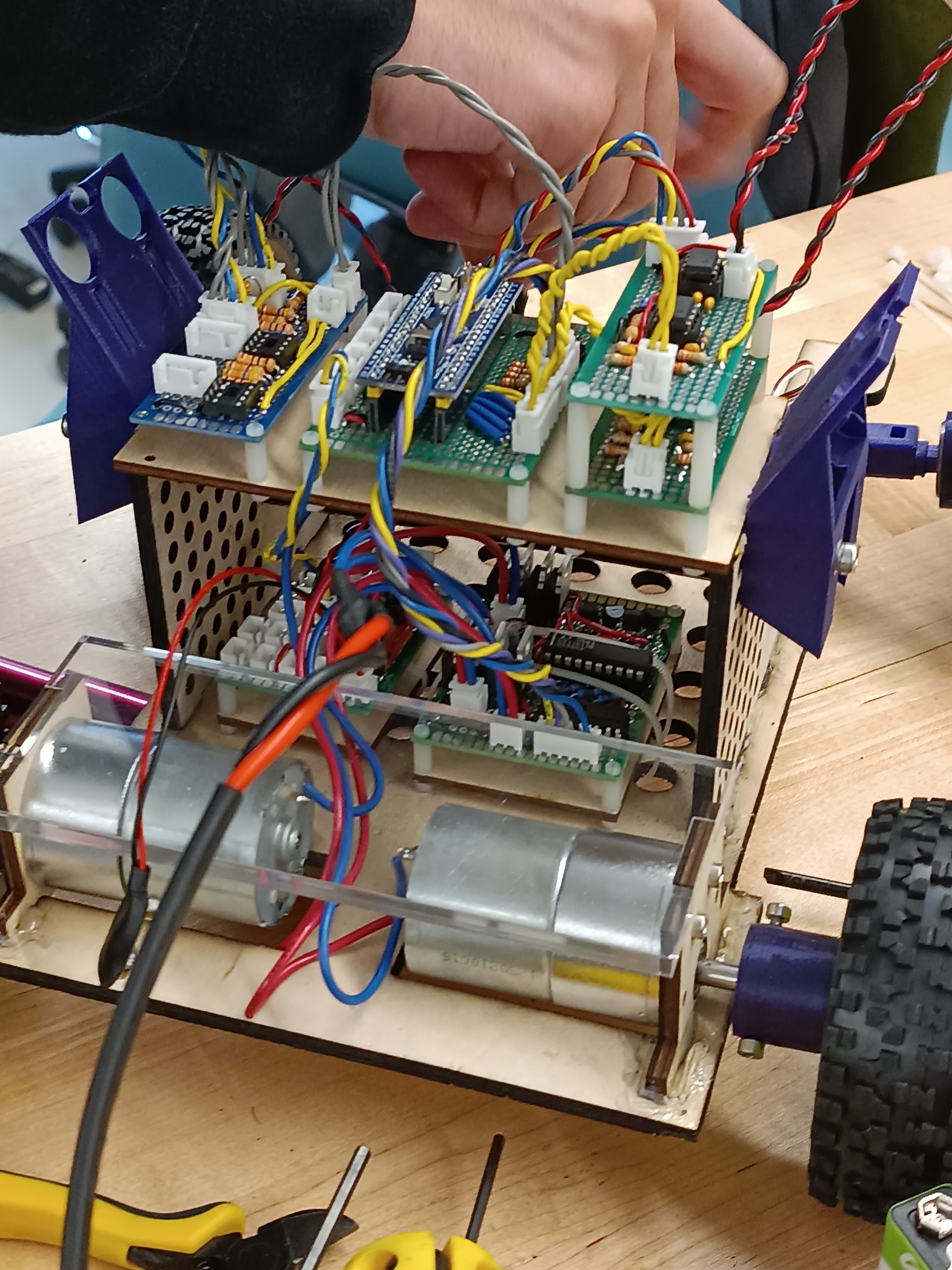
- Collaboratively designed the power distribution system with hardware signal processing and noise shielding
- Integrated sonars, infrared and reflectivity sensors, DC, servo, and stepper motors.
- Contributed to developing the microcontroller firmware, PID control, and signal processing algorithms including frequency filtering using convolution and Fourier transforms
Results
- The robot can autonomously follow the infrared beacon, and turn after detecting a certain intensity, then navigate itself using sonars to detect and avoid edges and obstacles. After it does so up the ramp, it drops the "Banana", it takes the zipline, dismounts, turn, catch the infrared signal and follow it, and repeat the whole process
- One of two teams that can take the zipline
- GitHub link for firmware code
Images & Videos